Ozone
-
Публикаций
9 312 -
Зарегистрирован
-
Посещение
Тип публикации
Форум
Календарь
Файлы
Блоги
Галерея
Все публикации пользователя Ozone
-
Прототипы новых фиксов в японском стиле.
-
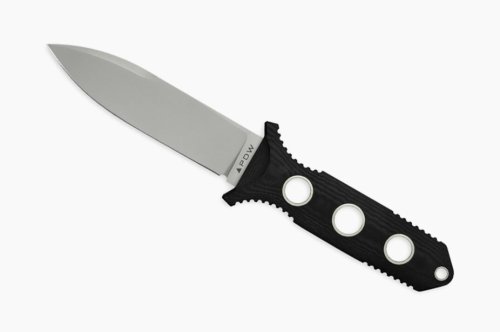
Prometheus Design Werx (PDW) OS3 Pack Knife Клинок - 101 мм из CPM S35VN.




-
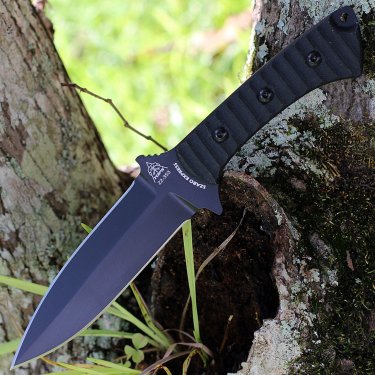
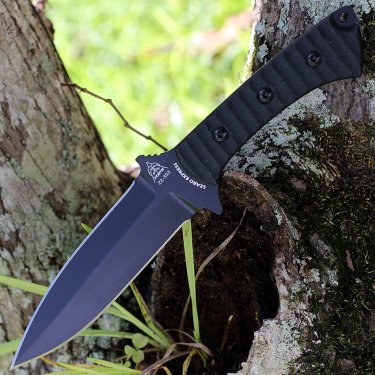
TOPS Szabo Express Клинок - 143 мм из 1095. Толщина - 4 мм. Дизайнер - Лаци Сзабо (Laci Szabo) Существует в двух версиях: с двухсторонней заточкой и односторонней.




-

-
Художник-робототехник Дэвид Боуэн решил выяснить, что же будет, если подключить роботизированную руку с мачете к растению и позволить ему управлять конечностью. Живой филодендрон, используемый в установке, управляет рукой с помощью микроконтроллера с открытым исходным кодом, который получает входные данные от электрических сигналов растения. Используя специальное программное обеспечение, эти сигналы в режиме реального времени сопоставляются с движениями суставов промышленного робота, держащего мачете. Таким образом, движения мачете определяются на основе входных данных от растения. Волнуюсь за судьбу художника.
-
Вариант литой рукоятки.

-


-

-

-
Воск сам уходит, когда люминь заливаешь.
-
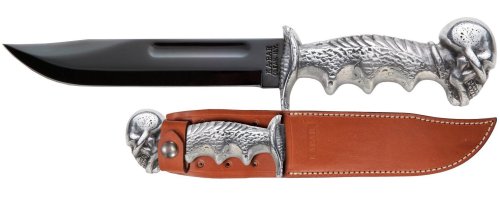
Cold Steel Lynn Thompson Signature Leatherneck Bowie Клинок - 267 мм из D2.

-
А тыльник, как сделан?
-
2 самоделка по-мотивам.
-
Они всем торгуют.
-
Дизайн, конечно, старый. Но на сайте Бокеров стоит в разделе новинок.
-
Pro-Tech Les George SBR Automatic Клинок - 64 мм из CPM-S-35VN.
-
Böker Heckler & Koch Alpha Клинок - 85 мм из X-15T.N.


-
Еще один способ. Отливка целой рукоятки прямо на хвостовик. Льют в песок по выплавляемой модели. Это, конечно, однократный способ, не для массового производства.
-
Похоже на то. Но подтвердить не могу. В живую ни разу не попадался. Даже хороших фото не видел. Только картинка из журнала.
-
Попался мини-документальный фильм про американскую фирму Ruana Knives. Заинтересовал момент с массовой отливкой рукояток ножей из алюминия (начиная с отметки 4:00). Льют прямо на хвостовике ножа в металлические разъемные формы. Потом дополнительно обрабатывают рукоятки, делают вставки из рога. Видимо, похожая технология литья применялась в ПК МООИР для отливки алюминиевых гард и тыльников ножей непосредственно на хвостовик. Кому есть чего добавить по данной технологии, добавляйте. Очень интересно.
-
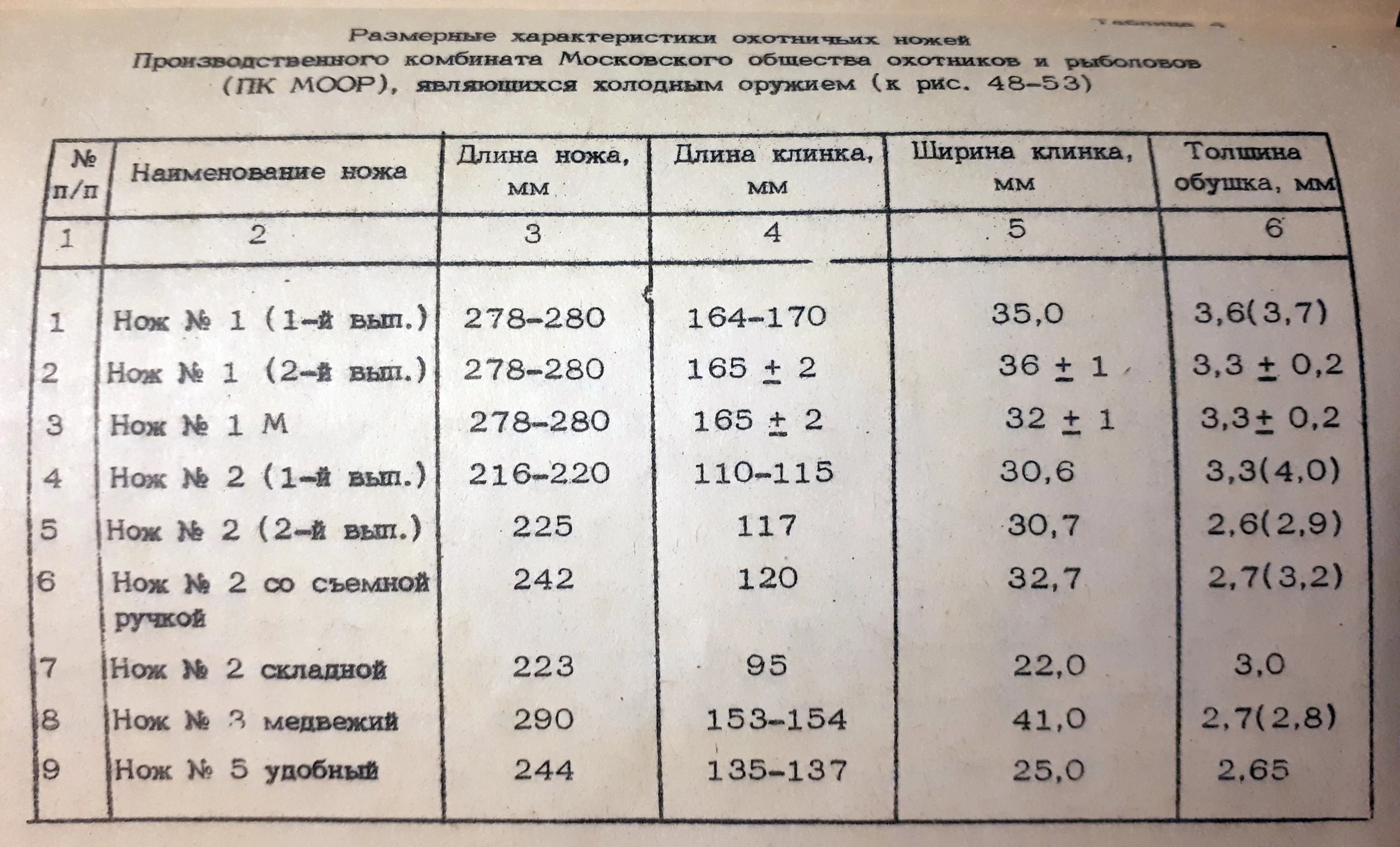
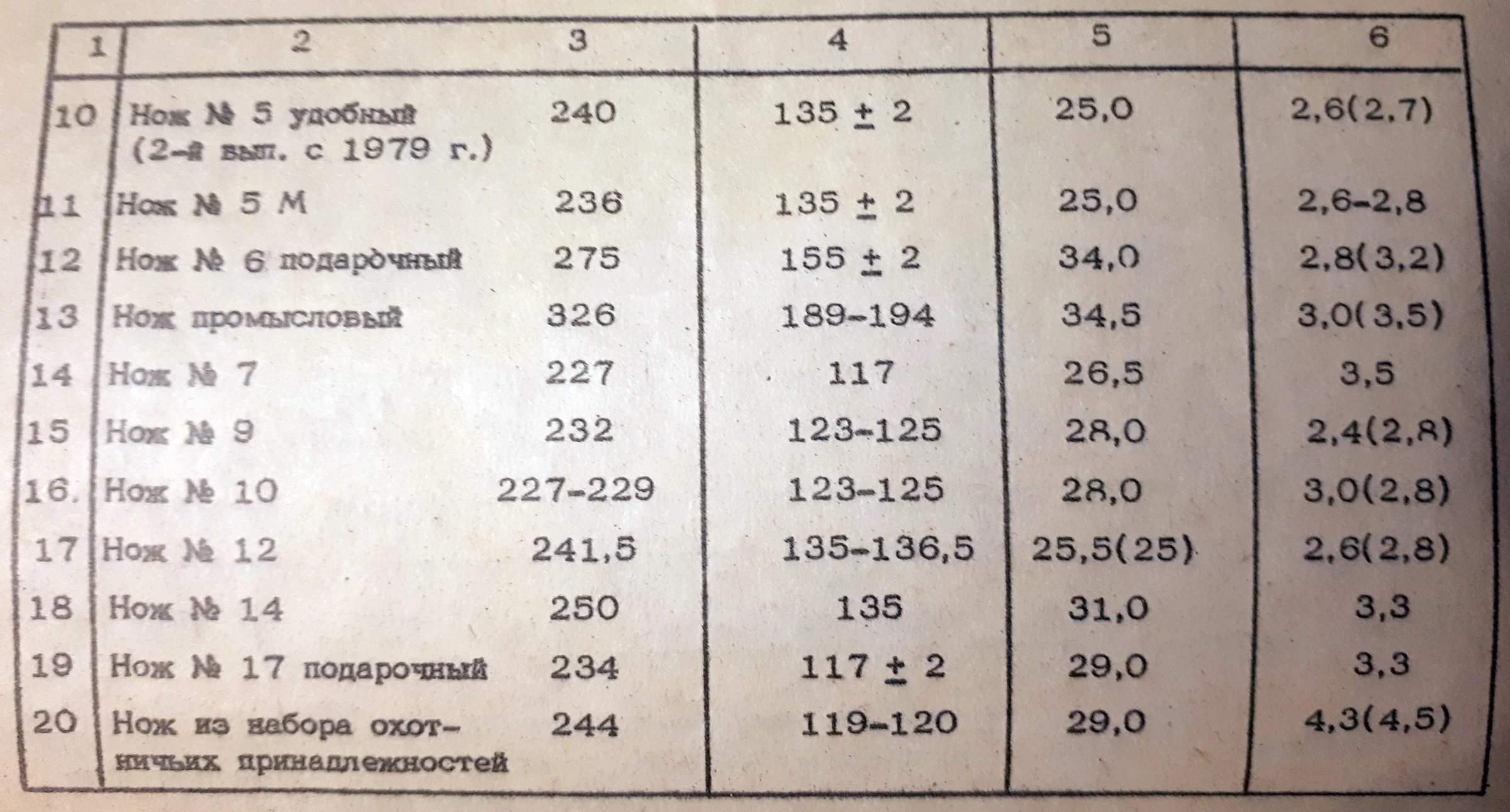
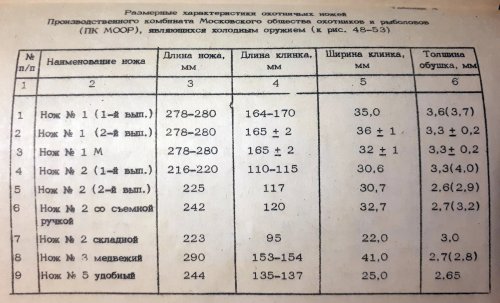
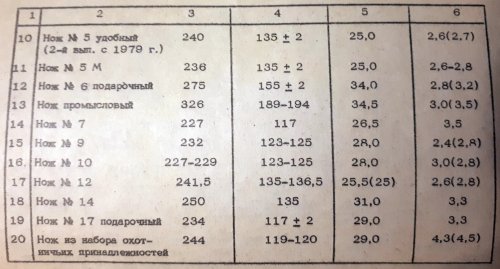
Похоже, что это какой-то каталог ПК МООИР. Более точной информации не нашел. Вот еще табличка от туда же.
-
С Днем Рождения! Здрав буди, боярин!
-
Boker Micro Tracker Клинок - 90 мм из 1095.




-

-
Может. Выглядит фабричным.